
reBot Arm B601-DM & Star Arm 102
| 商品管理番号 | seeed-studio-rebot-arm-set |
|---|

リーダーで操作した動きをフォロワーが再現し、その軌道データを収集。模倣学習(Imitation Learning)の教師データを、特別な装置なしで現場から集められます。
リーダーを手で操作
Star Arm 102 を手で動かし、作業の動きを直感的にティーチング。プログラミング不要。
フォロワーが追従
reBot Arm B601-DM が同じ動きで追従し、実際のピック&プレース等のタスクを実行。
データ収集 → 学習
操作の軌道・動作データを記録し、LeRobot / NVIDIA Isaac でそのまま模倣学習に活用。
研究室・大学・教育・企業 R&D の現場で。

遠隔操作・テレオペ
リーダーで遠隔操作し、動作データを収集。LeRobot と組み合わせて模倣学習へ。

生活支援・日常タスク
ピック&プレースから簡単な家事まで。視覚×学習制御で非定型な環境にも適応。
高精度・過酷環境
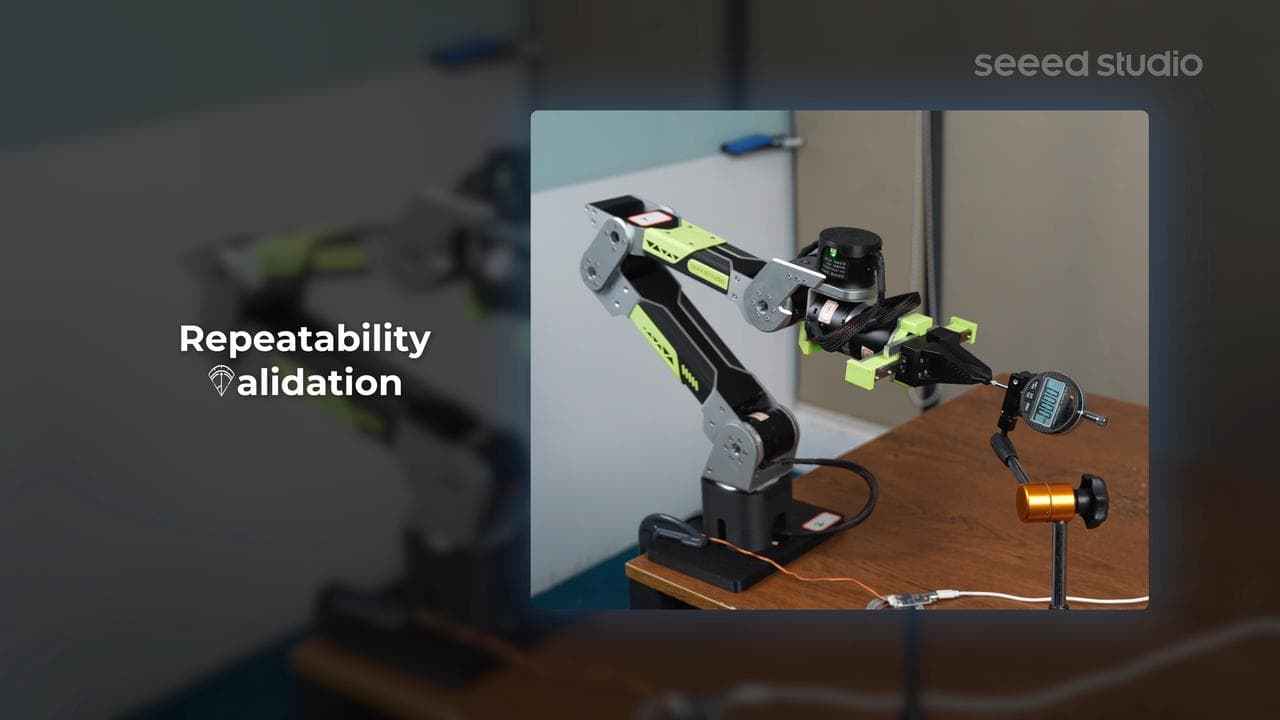
±0.2mm の反復精度で、検査・精密操作に。産業展開前の検証基盤として。
研究・開発のエコシステムに最初から組み込み済み。ベンダーロックインなしで使えます。
- ハードウェア設計図 / CAD(STEP)を公開
- フル BOM リスト(全部品の型番・調達情報)
- 制御アルゴリズム / Python SDK をオープンソースで提供
reBot Arm B601-DM
6軸+グリッパーの産業アーム。Damiao CANバスモーター駆動、可搬 1.5kg・リーチ 767mm・反復精度 ≤0.2mm。実タスクを担う本体です。

Star Arm 102
FashionStar UART スマートサーボ駆動の卓上リーダーアーム。手で動かしてフォロワーを遠隔操作し、軌道・動作データを直感的に記録します。





6+1 自由度・Damiao CANバスモーター。オープンソースのハード設計図/CAD(STEP)/フルBOM/Python SDK 付き。




FashionStar UART スマートサーボ駆動。手で動かすハンドガイド方式で、フォロワーを遠隔操作するための操作端として最適化。

| Star Arm 102 ― リーダーアーム主要仕様 | |
| 自由度 | 6+1 DoF(フォロワーと同一構造でテレオペに最適) |
| アクチュエータ | FashionStar UART スマートサーボ(シリアルバス制御) |
| 役割 | リーダー/ハンドガイド操作(手で動かしフォロワーを遠隔操作) |
| 制御アルゴリズム | 解析的逆運動学(Pieper 条件・透明アルゴリズム) |
| 対応ソフトウェア | ROS2 / LeRobot(エコシステム互換) |
| 提供形態 | 完成品/DIYキット(教育・研究向け) |
リーチ 約420mm(6+1 DoF)。仕様は予告なく変更される場合があります。
| セット仕様 | |
| 構成 | フォロワー:reBot Arm B601-DM / リーダー:Star Arm 102 |
| 自由度 | 6+1(6軸 + グリッパー) |
| 可搬質量 | 1.5 kg |
| 最大リーチ | 767 mm |
| 反復位置精度 | ≤ 0.2 mm |
| 電源 | DC 24V(AC/DCアダプタ 24V/15A 同梱) |
| 本体質量 | 約 4 kg(フォロワー) |
| アクチュエータ | Damiao(DM)CANバスモーター(フォロワー)/ FashionStar UART スマートサーボ(リーダー) |
| 対応ソフトウェア | ROS1 / ROS2 / LeRobot / Pinocchio / NVIDIA Isaac Sim / MoveIt / Python SDK |
| オープンソース | ハード設計図・CAD(STEP)・フルBOM・制御アルゴリズム |
| 同梱物 | Body Motor Kit ×1 / Body Structure Kit ×1 / Gripper Kit ×1 / 24V/15Aアダプタ ×1 / Star Arm 102 リーダー ×1 |
| 出荷拠点 | 中国 / 米国 / ドイツ 倉庫(納期・送料は要確認) |
仕様は改良のため予告なく変更される場合があります。最新情報はお問い合わせください。




